Jonomittauksen laskenta
Jonomittauksen laskentaa voidaan käyttää yksinkertaisten jonojen laskentaan. Laskenta hallitsee tostaiseksi vain yhden molemmista päistä suljetun jonon eli jonon on lähdettävä tunnetulta pisteeltä ja päädyttävä tunnetulle pisteelle. Lisäksi molemmissa päissä on oltava liitoshavainnot tunnetuille pisteille.
Toiminto löytyy valikosta Laskenta / muut / Jonomittaus.
Havaintojen luku
Havaintokirjana toimii hajapistetiedosto, jossa kulma- ja etäisyyshavainnot ovat pisteiden ominaisuuksina:
OBSSTATION - Asemapisteen tunnus havaintopisteellä.
OBSDIRECTION - Havainnon vaakakehälukema (1- tai 2-asennossa) gooneina.
OBSVERTICAL - Havainnon pystykehälukema (1- tai 2-asennossa) gooneina.
OBSDISTANCE - Havainnon vinoetäisyys korjauksineen.
Havaintojen oletetaan sisältävän kaikki tarvittavat korjaukset (prisma, refraktio, jne.). Havaintosarjojen järjestyksellä ei ole merkitystä. Kaikki samaan kohteeseen mitatut havainnot ovat laskennassa saman arvoisia. 1- ja 2-asentojen havainot normalisoidaan ennen laskentaa.
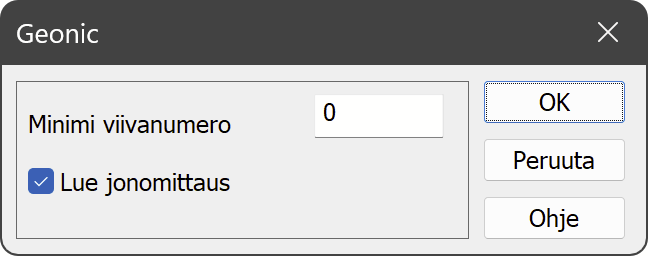
Havainnot voidaa lukea GT-muotoisesta havaintokirjasta laittamalla Geonic-muuntimeen päälle Lue jonomittaus -asetus:
GT-havaintokirja sisältää havainnot kommentteina, joissa asemapisteet on merkitty tunnuksella ASP ja liitospistehavainnot tunnuksella LIP. Esimerkki havaintosarjasta asemapisteeltä L0368 liitospisteisiin L0348 ja 1005.
! Tanaan on 15.04.2021 , kello on 10:08:41
! Mittaaja MIKKO , lämpotila 6 , paine 1033
!---
! ASP 9 0 5 L0368 1.6460
!--- mm: 0.0, ppm: -11.9
! LIP 9 0 5 L0348 339.85067 99.50051 205.02906 1.6850
! LIP 9 0 6 1005 166.73915 101.08524 162.84626 0.0000
! LIP 9 0 6 1005 366.73897 298.91033 162.84586 0.0000
! LIP 9 0 5 L0348 139.84983 300.49710 205.02916 1.6850
! LIP 9 0 5 L0348 339.84785 99.50083 205.02886 1.6850
! LIP 9 0 6 1005 166.73750 101.08715 162.84616 0.0000
! LIP 9 0 6 1005 366.73791 298.91141 162.84596 0.0000
! LIP 9 0 5 L0348 139.84884 300.49704 205.02946 1.6850
! LIP 9 0 5 L0348 339.84923 99.49991 205.02896 1.6850
! LIP 9 0 6 1005 166.73747 101.08594 162.84636 0.0000
! LIP 9 0 6 1005 366.73760 298.91104 162.84636 0.0000
! LIP 9 0 5 L0348 139.84963 300.49750 205.02856 1.6850
! LIP 9 0 5 L0348 339.84895 99.50117 205.02896 1.6850
! LIP 9 0 6 1005 166.73815 101.08768 162.84636 0.0000
! LIP 9 0 6 1005 366.73853 298.91114 162.84626 0.0000
! LIP 9 0 5 L0348 139.84916 300.49884 205.02906 1.6850Tiedoston lopussa on oltava tunnettujen pisteiden koordinaatit normaalissa GT-muodossa:
5 L0348 6822304.140 24483559.552 106.432
5 L0368 6822423.174 24483392.628 104.857
6 L0451 6823083.479 24482875.655 109.650
5 L0465 6823223.896 24482918.173 111.134Asetukset
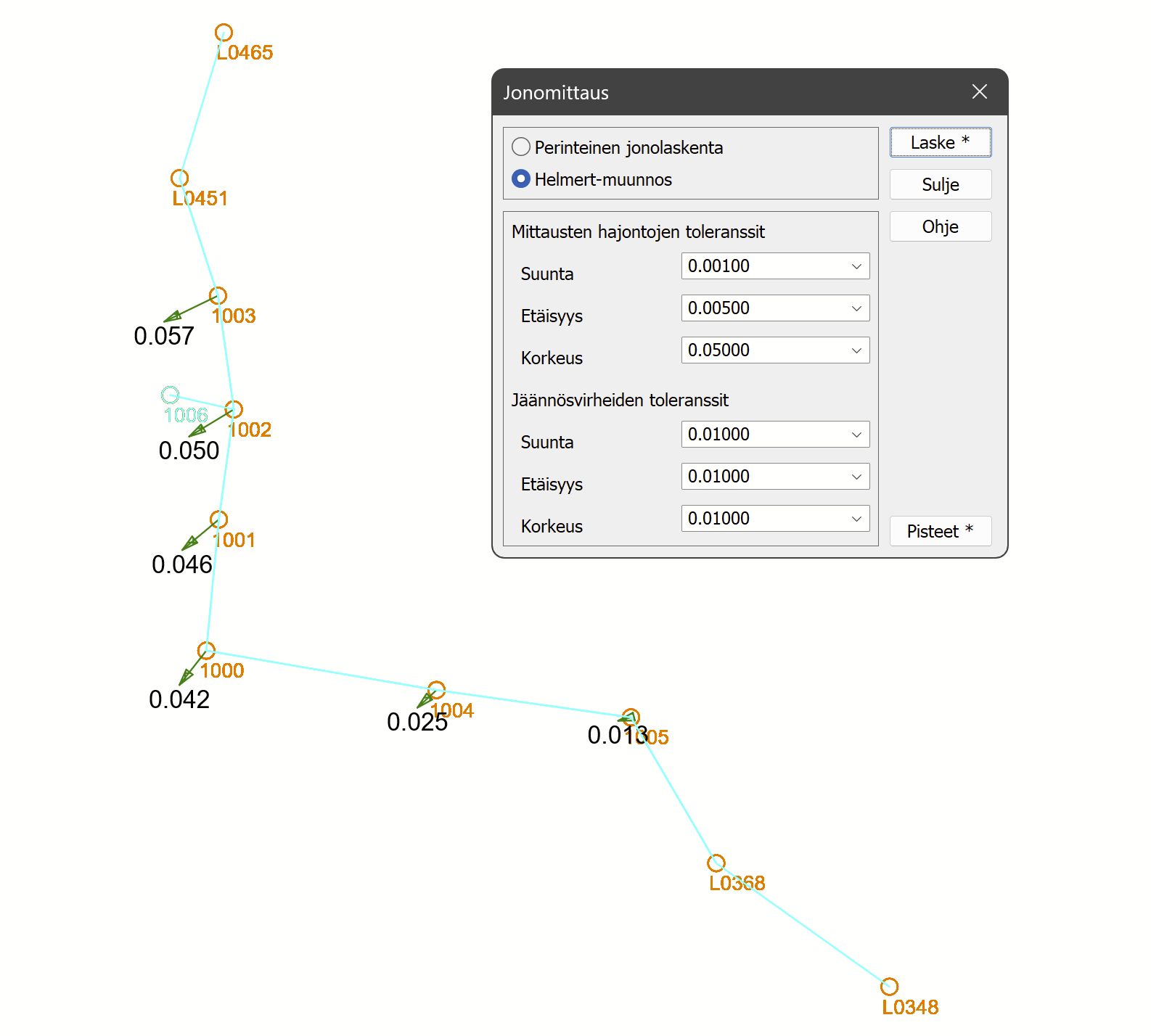
Asetuksina voidaan antaa hajontojen ja sulkuvirheiden toleranssit:
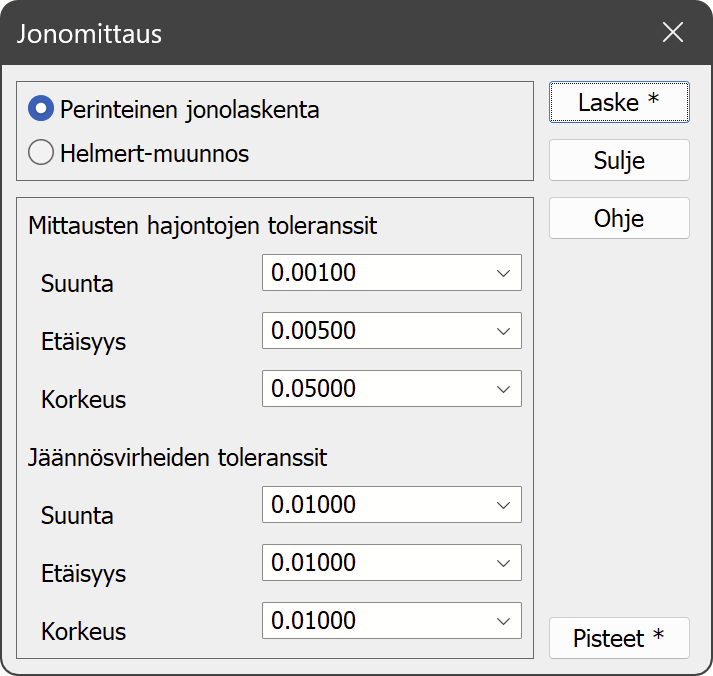
Mittaussarjojen havainnot normalisoidaan ja niistä lasketaan keskiarvot sekä keskihajonnat. Keskiarvoja käytetään jonon laskentaan ja hajonnat kirjoitetaan tulostiedostoon. Jäännösvirheiden toleransseja käytetään sulkupisteen kanssa.
Jos hajonta tai sulkuvirhe ylittää annetun arvon, tämä merkataan tulostiedostoon tähdellä:
Station: L0451 Height: 1.62100
Point: 6823083.47900, 24482875.65500, 109.65000
Target: 1003
Direction: 58.43842 Deviation: 0.00102*
Distance: 119.14506 Deviation: 0.00019
Height: 1.59787 Deviation: 0.00409Yksittäisten havaintojen editointia tai poistamista ei toistaiseksi ole. Tämän kuitenkin voi tehdä editoimalla alkuperäistä tiedostoa tai siitä luettuja hajapisteitä havaintoineen.
Jonon lähtösuunta määräytyy ensimmäisen asemapisteen havainnosta tunnettuun liitospisteeseen. Sen jälkeen jokaisen uuden jonopisteen paikka laskentaan havainnoista edelliseltä asemapisteeltä. Näin edetään kunnes päästään jonon loppuun:
Traversed points:
162.82253
Point 1005: 6822563.74390, 24483310.46183, 103.72066
189.23813
Point 1004: 6822590.10350, 24483123.06855, 106.10779
225.04153
Point 1000: 6822628.05607, 24482901.25039, 109.13723
127.02556
Point 1001: 6822754.50574, 24482913.33232, 108.36905
107.06677
Point 1002: 6822860.59655, 24482927.75563, 109.10219
110.62411
Point 1003: 6822970.15972, 24482912.47140, 109.67695
119.14465Perinteinen jonolaskenta
Bowditch menetelmänä tunnetussa perinteisessä jonotasoituksessa lasketaan ensin suunnan sulkuvirhe jonon päätepisteessä. Tämä virhe tasoitetaan tasan jonon kulmahavantojen kesken:
Direction delta: -0.00512
Adjusting directions:
166.73816 -> 166.73752
381.29145 -> 381.29081
243.99291 -> 243.99227
157.67536 -> 157.67472
185.13853 -> 185.13789
72.09094 -> 72.09030
172.26160 -> 172.26096
297.19517 -> 297.19453Tämän jälkeen jonon pisteiden koordinaatit lasketaan uudestaan korjatuilla kulmahavainnoilla.
Traversed points:
162.82253
Point 1005: 6822563.74307, 24483310.46041, 103.72066
189.23813
Point 1004: 6822590.09891, 24483123.06660, 106.10779
225.04153
Point 1000: 6822628.04477, 24482901.24730, 109.13723
127.02556
Point 1001: 6822754.49493, 24482913.32414, 108.36905
107.06677
Point 1002: 6822860.58647, 24482927.74211, 109.10219
110.62411
Point 1003: 6822970.14871, 24482912.45126, 109.67695
119.14465Saadaan uudet sulkuvirheet jonon päätepisteen tunnetuille koordinaateille. Nämä virheet sitten tasoitetaan jonon pisteille etäisyyksien suhteessa:
Coordinate delta: 0.03904, 0.08925, 0.00541
Total length: 1040.96328
Adjusting coordinates
Point 1005 + 0.00611, 0.01396, 0.00085 -> 6822563.74918, 24483310.47437, 103.72151
Point 1004 + 0.01320, 0.03019, 0.00183 -> 6822590.11211, 24483123.09679, 106.10962
Point 1000 + 0.02164, 0.04948, 0.00300 -> 6822628.06642, 24482901.29678, 109.14022
Point 1001 + 0.02641, 0.06037, 0.00366 -> 6822754.52134, 24482913.38451, 108.37271
Point 1002 + 0.03042, 0.06955, 0.00421 -> 6822860.61689, 24482927.81166, 109.10640
Point 1003 + 0.03457, 0.07904, 0.00479 -> 6822970.18328, 24482912.53030, 109.68174Pisteillä on nyt tasoitetut koordinaatit. Muutokset voidaan visualisoida laskemalla tarkkeet alkuperäisistä koordinaateista tasoitettuihin koordinaatteihin:
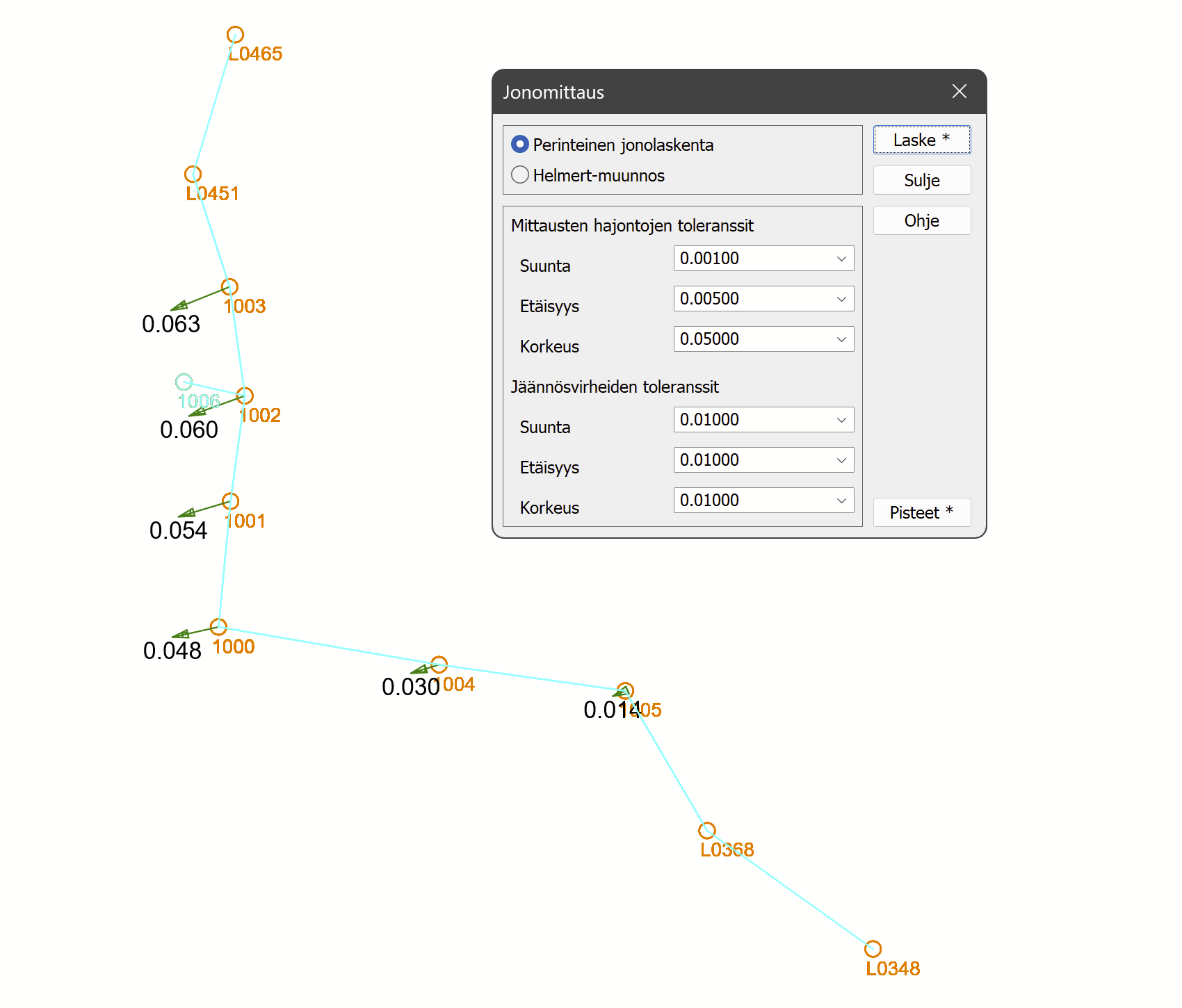
Jonopisteen siirron määrä kasvaa jonon edetessä.
Helmert-laskenta
Helmert-laskennassa muodostetaan Helmert-muunnosparametrit jonon alku- ja loppupisteiden avulla. Näillä parametreilla sitten muunnetaan välillä olevat uudet jonopisteet.
Kahdella eri tavalla laskettujen jonojen koordinaatit eroavat hieman toisistaan. Jos jono on suhteellisen suora, erot menetelmien välillä ovat pieniä. Mutkittelevissa jonoissa erot voivat olla isompia. Alla tarkelaskennan erovektorit edellisistä eri menetelmillä lasketuista tasoituksista:
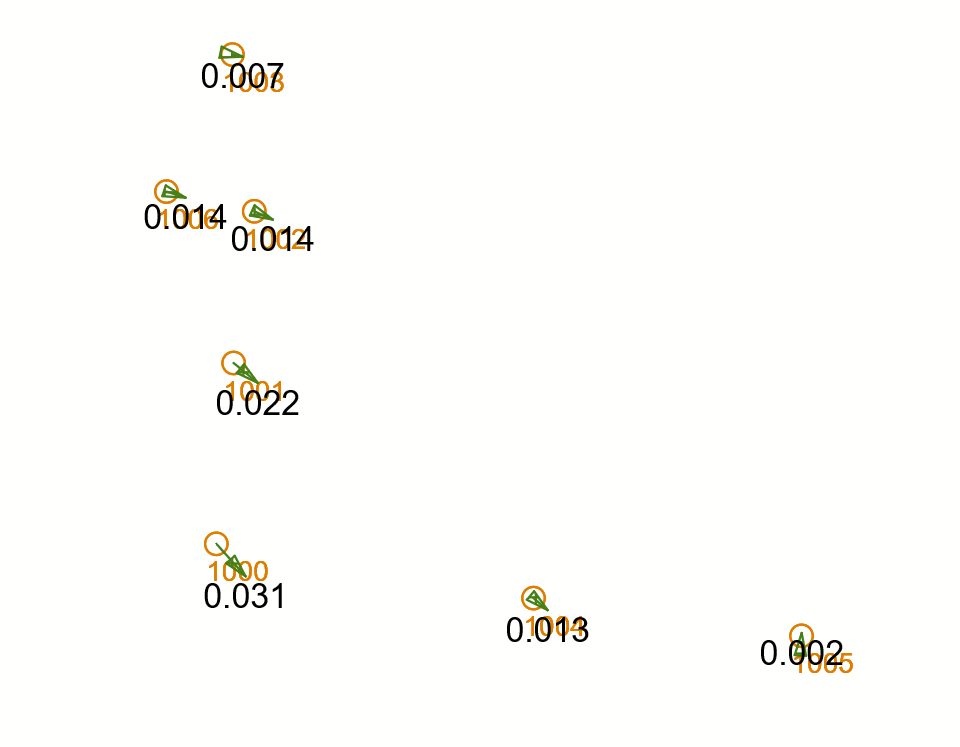
Suurin ero tulee jyrkässä mutkassa.
Kartoitushavainnot
Jono voi sisältää samaan aikaan mitattuja erillisiä kartoitushavaintoja. Näitä ei käytetä itse jonon laskentaan, vaan niille lasketaan koordinaatit erikseen. Samalle kartoituspisteelle voi olle mitattu havaintoja useilta eri jonopisteiltä. Kustakin havaintosarjasta lasketaan keskiarvohavainto, jolla lasketaan kartoituspisteen koordinaatti. Jos samalle pisteelle on useita havaintosarjoja, lopullinen koordinaatti on näistä laskettujen koordinaattien keskiarvo.
Tulokset
Tulostiedostoon kirjoitetaan käytetyt toleranssiparametrit sekä jonohavaintojen keskiarvot hajontoineen. Sen jälkeen tulee laskentamenetelmän mukaiset tasoitustiedot. Lopuksi kirjoitetaan vielä lista kartoituspisteistä.
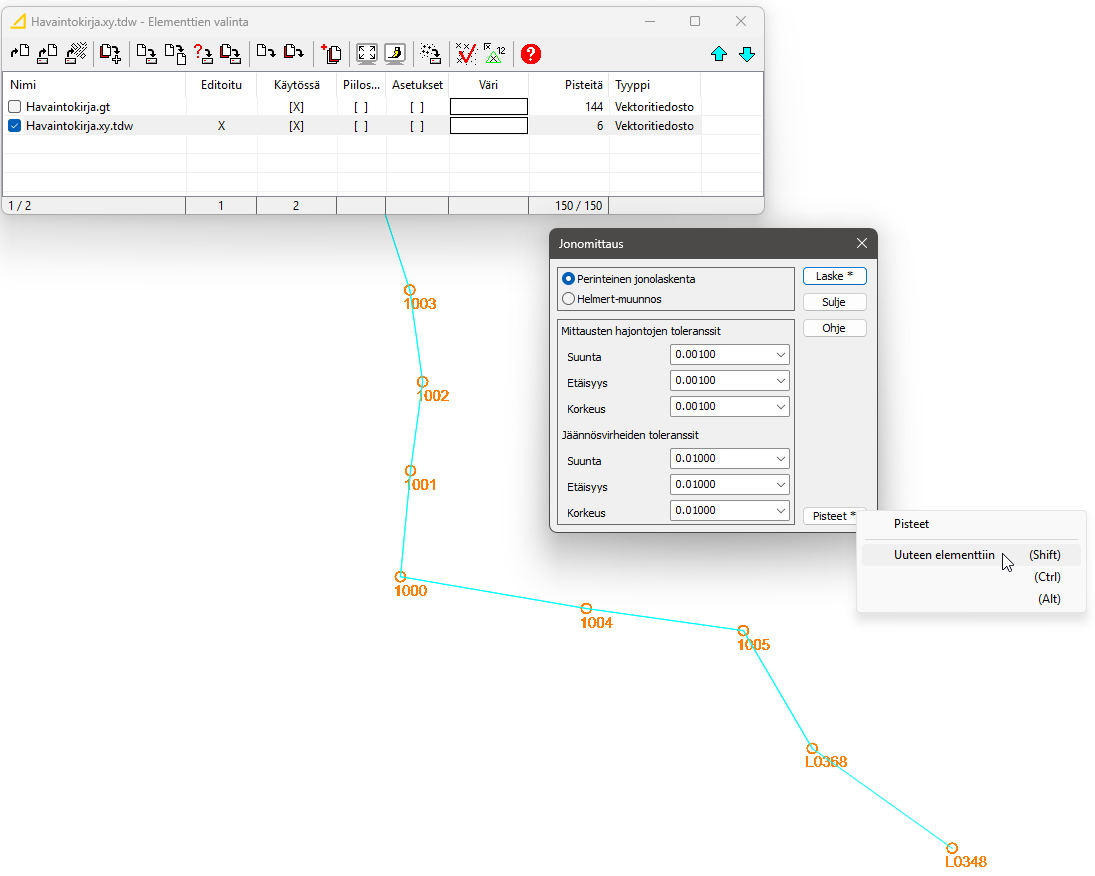
Lasketut pisteet uuteen elementtiin
Uudet, tasoitetut pisteet saa poimittua uuteen elementtiin Shift+Pisteet painikkeella.